6軸ロボットの可動範囲を検討する
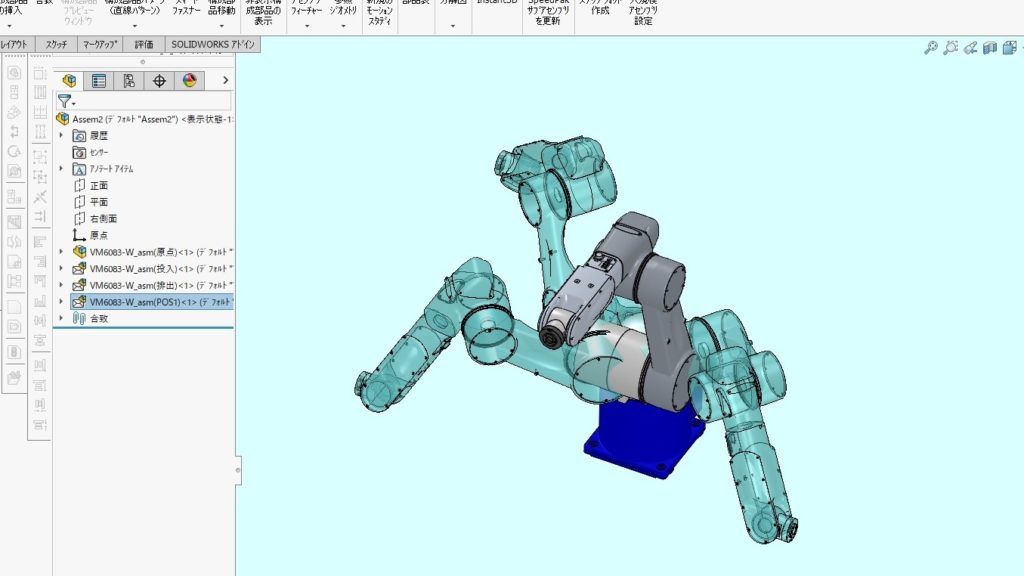
1.弊社では6軸ロボットを使用する設計の場合、実際のポジションにモデルを動かしてみることによって、先端の可動範囲やアームのおおよその可動範囲を検討しています。
2.メーカーのホームページからダウンロードしてきたモデルは中間形式で、ソリッドワークスに取り込むと下図のように全てのパーツが固定状態となります。
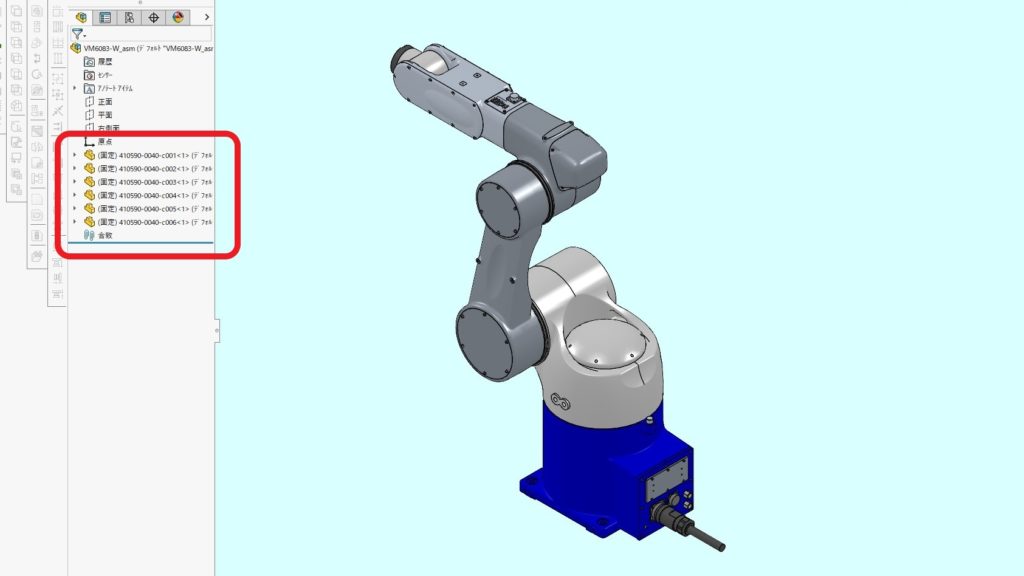
これでは可動範囲に動かしてみることができませんので、固定状態を解除して拘束を追加します。
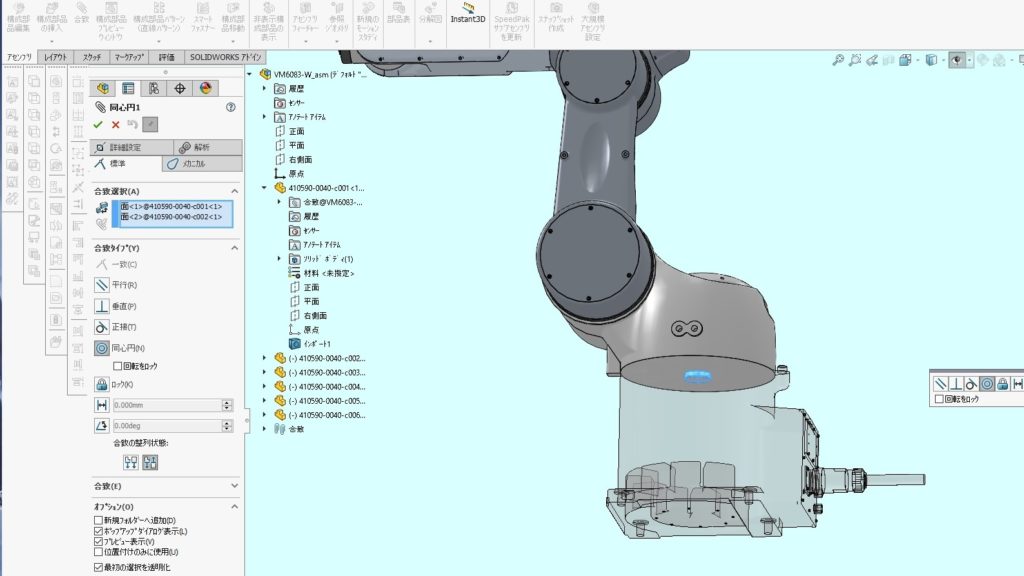
3.まずはベース部分の三面とアセンブリの三面をそれぞれ合致します。
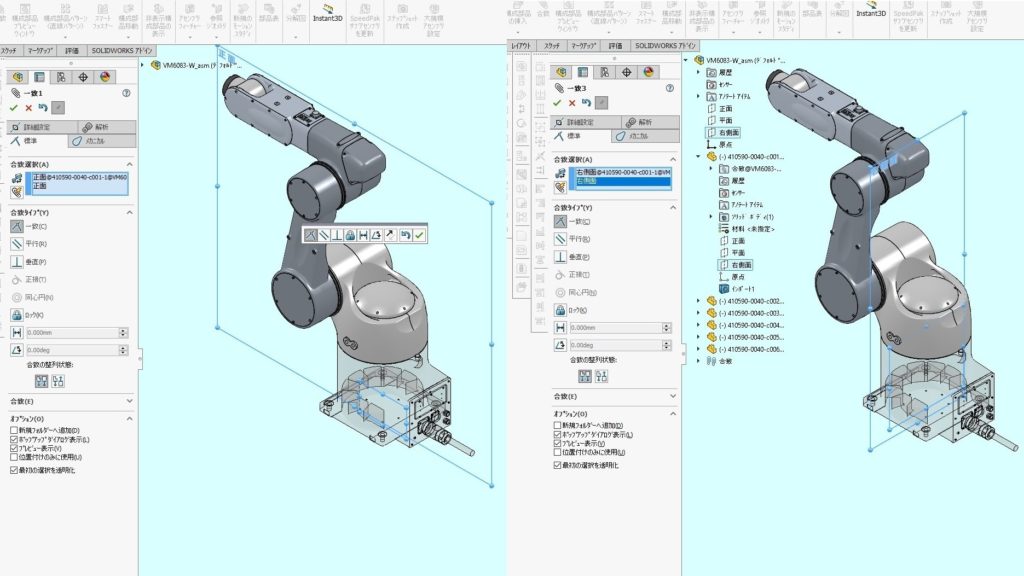
4.それぞれの軸を位置関係に注意して合致拘束します。可動範囲に動かしたいため、回転方向はフリーにしておきます。
5.後で拘束を追加しやすくするため、6軸目に点・軸を参照ジオメトリで追加しておきます。

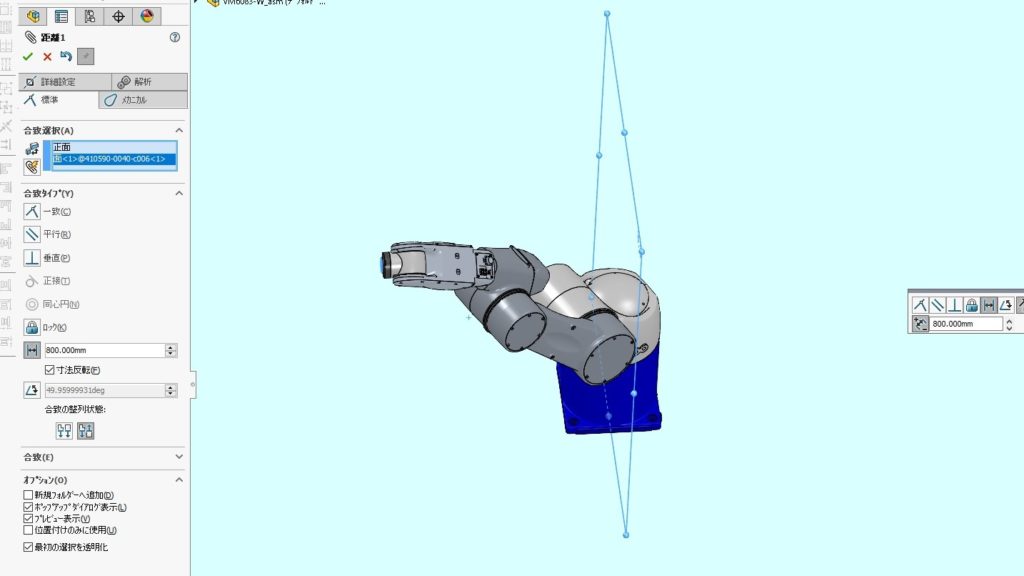
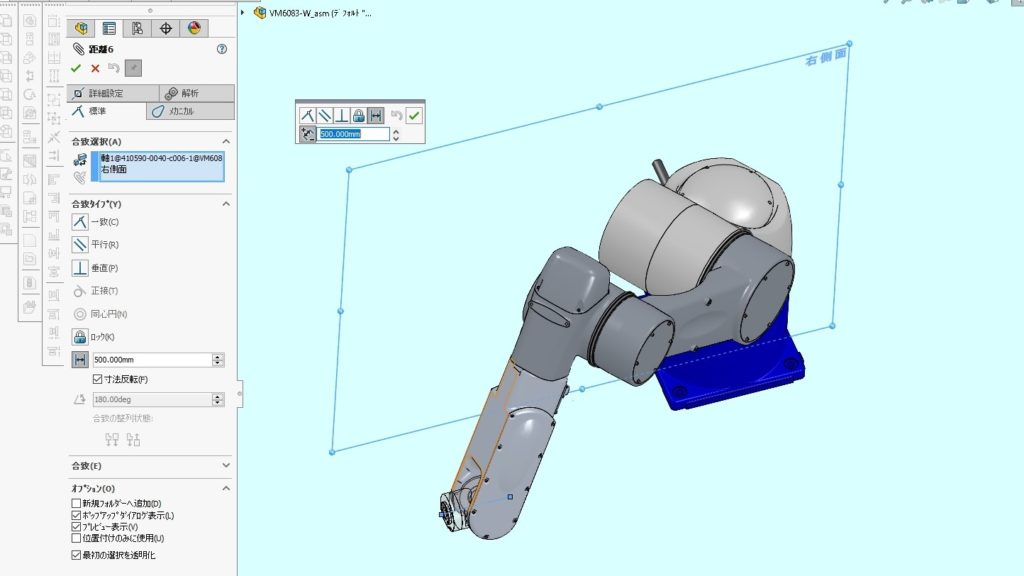
6.6軸目とアセンブリの正面・平面・右側面と距離で拘束を追加します。ハンドの位置や姿勢によって都度、拘束の種類を追加してみてください。

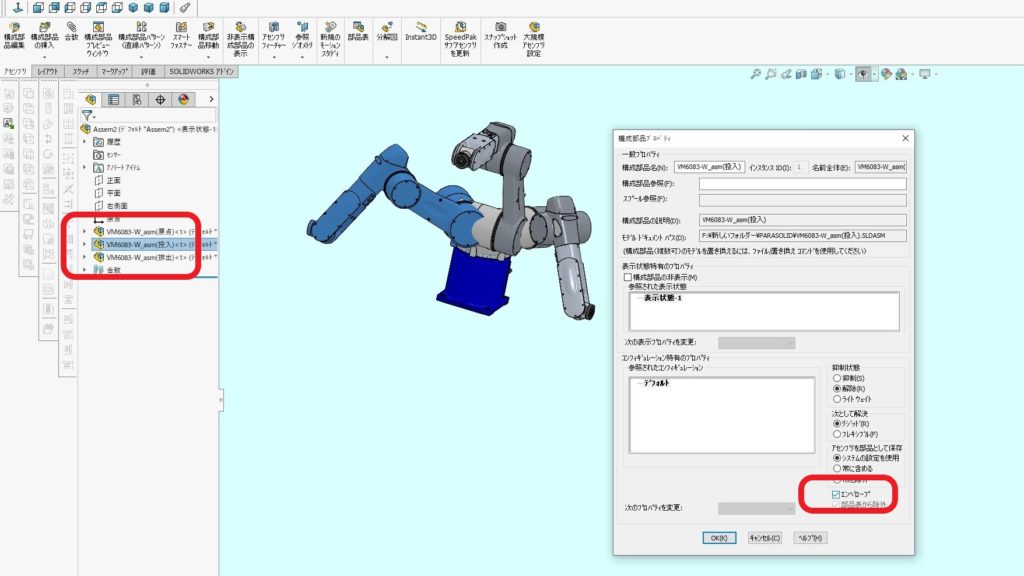
7.ロボットはポジション毎に名前を変えて保存した方が都合が良いです。原点のアセンブリ以外はエンベロープにしておきます。エンベロープにすることによって、部品表に表示されなくなったり、一括ですべてのエンベロープを非表示に設定できたり、扱いが楽になります。